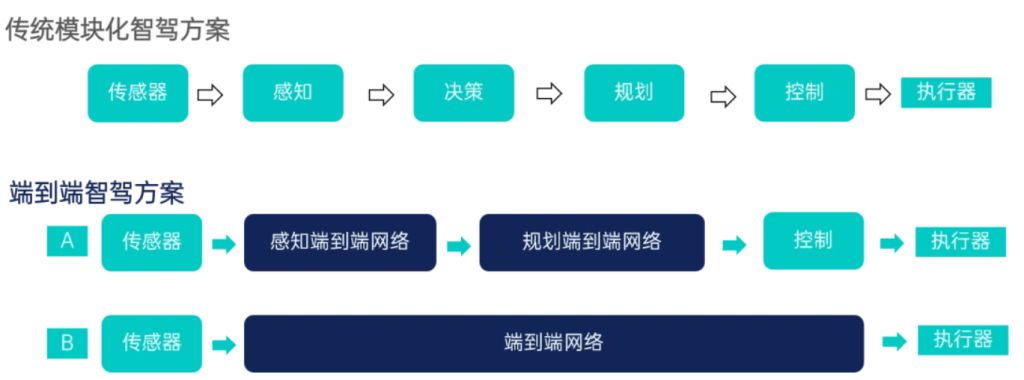
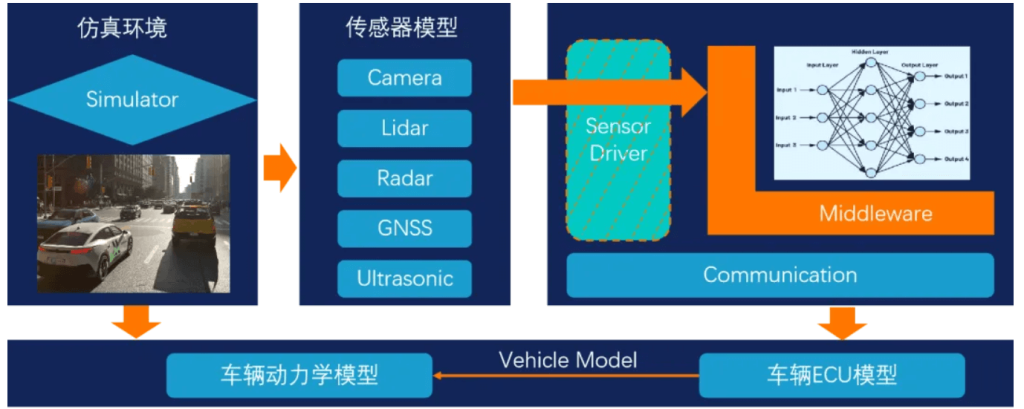
端到端智驾仿真测试:全攻略 | 如何高效验证您的自动驾驶系统 Post author:hkcloudclassroom Post published:2025年7月28日 Post category:Uncategorized / 虹科干货 前言 随着智能驾驶技术的发展,端到端的解决方案被越来越多的开发者提及,各大汽车企业争先恐后将端到端智驾方案部署到量产新车型上。过去,智能驾驶方案一直是按照感知、决策、规划、控制这类规则驱动(rule-based)的模块化方法推进,然而规则驱动的模块化方案存在“规则难以穷举、ODD边界模糊、扩展与维护升级困难”等局限性。因此端到端的学习驱动(learning-based)方案应运而生。 端到端的方案具有很多显而易见的优势,首先,它具备较强的泛化能力,可以通过数据发现潜在规律,适应多样化和复杂场景;其次,端到端可实现全面优化,学习驱动直接将输入(如传感器数据)映射到输出(如车辆控制指令),避免了模块化方案中的中间过程(如感知、决策和控制分离)可能导致的信息丢失或误差累积;此外,端到端可持续学习和升级,模型可以通过在线学习或周期性训练,不断吸收新数据,从而适应动态变化的环境需求,如更新的道路法规、复杂的新场景等。 可见,端到端智驾方案优势非常明显,但是对于仿真测试来说却是“灾难性的挑战”。过去模块化智驾方案中,感知与规控之间有显性接口。无论是SIL仿真还是HIL仿真,可以轻松绕过感知模块,直接对规控进行仿真测试(即使输入合成的低置信度图像或点云,也不对感知进行评测)。而端到端方案的到来,不再有所谓感知与规控接口,原有SIL或HIL仿真方案需要重构。面向端到端的智驾仿真必须从传感器输出数据切入,提供一种置信度高、一致性好、覆盖率全面、故障注入便捷的全链路闭环仿真方案。我们探索了一种有效的端到端智驾仿真解决方案,在仿真引擎和数据传输上进行了大幅优化,以应对端到端带来的挑战,整体框架如图2所示。本方案充分利用了智能驾驶的中间件技术,将仿真引擎生成的传感器原始数据(部分为结构化数据)直接传递给智驾应用层,绕过了传感器硬件和驱动,缩短了仿真数据传输链路,规避了仿真系统开发过程带来的复杂适配与调试工作。大大缩短开发周期的同时,还显著降低了整个仿真系统的成本。 了解更多智驾仿真测试内容,请点击下方按钮阅读全文 阅读全文 关于康谋科技 康谋是一家自动驾驶解决方案供应商(前身是虹科自动驾驶事业部)。我们以数据为驱动力,提供高性能的数据采集、记录、传输方案,针对各种驾驶场景进行精准的仿真模拟,以及对大量自动驾驶数据进行高效、高质量处理。我们的一站式服务能够满足自动驾驶领域研发测试的全流程需求。通过深入了解客户需求,结合行业最新技术和趋势,我们致力于为客户提供最适配的自动驾驶解决方案,助力客户在自动驾驶领域取得更大突破。 走进康谋官网 你可能也喜欢 白皮书免费获取: ADAS/AD数据采集与高性能车载计算解决方案 2025年7月23日 突破加密壁垒!虹科Baby-LIN让加密ECU测试轻松落地 2025年7月21日 CAN总线故障频发?5分钟掌握PCAN高效排障技巧 2025年7月22日