导读
在设计CAN XL总线系统时,一个主要目标是确保在所有操作条件下的可靠通信。因此,系统设计师需要考虑许多约束条件,并选择合适的位定时配置。最相关的两个约束是时钟源的频率公差df 和由物理层效应引起的位长度不对称性。

本文推导了计算CAN XL最大时钟公差df 的公式,评估并比较了CAN FD和CAN XL的df 。此外,本文还将CAN FD中的「相位缓冲」度量方法引入到CAN XL中,该度量方法可以评估CAN XL总线系统的鲁棒性,即在多大程度上可以容忍物理层效应,而不会危及CAN XL通信的可靠性。
01 文章概述
1.1 CAN技术演化概述
为了在CAN总线中确保在所有操作条件下的可靠通信,系统设计师必须:①选择合适的位定时配置;②检查CAN时钟源的精度是否足够高;③了解物理效应对总线的影响(例如位不对称、振铃等)
CAN CC [1]最早由博世(Bosch)于1986年在SAE大会上提出。这一在当时具有革命性的通信协议成为了CAN成功的起点。CAN CC的位定时配置在文献[2]中进行了详细解释。
CAN FD [3]最早由博世(Bosch)于2012年提出。它允许比CAN CC使用更短的位时间,但也要求更加细致的系统设计。CAN FD的位定时配置在文献[4]中进行了阐述。对于CAN FD,文献[5]列出了相位误差的来源,解释了时钟公差公式,并引入了一种新的度量指标——「相位缓冲」。文献[6]包含了CAN FD网络设计的公式、建议和实践指南。文献[7]强调了CAN FD错误检测机制的优势。
CAN XL的规范自2018年12月起在CiA(CAN in Automation)的CAN XL特别兴趣小组中开始制定。CAN XL已于2024年发布为ISO标准[12]。CAN XL支持新型的SIC XL收发器[11],以实现最高达20 Mbit/s的波特率。文献[8]展示了如何将CAN XL节点引入现有的CAN网络。文献[9]和[10]强调了CAN XL中众多改进的错误检测机制。CiA 612-1 [13]已于2024年发布,提供了宝贵的系统设计建议,例如关于①时钟频率、公差、抖动;②位定时配置;③操作模式等方面的建议。
1.2 文章内容
本文分为两部分:
在第一部分,我们推导了计算CAN XL节点时钟频率公差df 的条件。接着,我们使用一组位定时配置来评估df 的值,并将结果与CAN FD进行比较。
在第二部分,我们推导了从CAN FD中借用的度量指标——「相位缓冲」[6],并将其应用于CAN XL。该度量方法可以用来评估CAN XL总线系统的鲁棒性,即在多大程度上可以容忍物理层效应。
1.3 相位误差
CAN节点通过同步接收的位流来实现可以使用较低成本的振荡器作为CAN节点的时钟源。CAN节点时钟频率的公差范围取决于所使用的位定时配置。
物理层上的模拟效应(如引脚、收发器、电缆等)会导致位边沿的偏移和信号电平的不稳定。随着位时间变短,这些效应对通信的鲁棒性影响会更大。
相位误差定义:对于每个接收节点,检测到的边沿位置与预期位置之间的时间差称为该边沿的相位误差[2]。
存在不同的相位误差来源,这些误差会叠加形成总的相位误差。本小节将介绍这些误差来源及其原因。
1.4 误差分类
累计误差
累积误差会导致相位误差随着时间的推移不断增加,即相位误差会随着时间的推移而增大。「频率误差」是唯一的累积误差,它是由于发送端和接收端节点时钟之间的频率差异造成的。(在此,我们忽略了第二类累积误差——「错误的波特率配置」,例如用户配置了1.05 Mbit/s而不是1Mbit/s的波特率。)
CAN节点在每个位流的下降沿(1➔0)进行(重新)同步,以消除累积的相位误差。
非累计误差
非累积误差是位边沿的暂时性偏移或接收器内部视图的偏移。这些误差是偶发的,不会随着时间的推移而叠加。对应的误差源包括:
- 量化误差:CAN节点每个时间量子采样一次接收的位流,这会导致最多一个时间量子的误差。
- 位对称性误差:位的长度相比协议控制器传输时发生了变化,即接收到的位是非对称的。这可能由以下因素引起:
- CAN收发器
- 网络拓扑
- 电磁干扰
- CAN接收和发送信号的上升/下降时间不对称
- 节点时钟频率的抖动(影响接收和发送节点)
02 CAN XL中的节点时钟频率公差(df )
2.1 概述
2.2 CAN XL 属性
为了理解df 条件推导所需的CAN最重要的属性,以下是相关内容的总结。
为了同步接收的位流,CAN节点对接收到的位进行过采样,并根据总线上感知到的信号来修正其内部视图。节点仅在下降沿(从逻辑1到逻辑0的信号边沿)进行同步。例如,如果接收的CAN节点识别到某个下降沿出现在预期时间之前或之后,它将修正其内部视图,使其与发送位的节点同步。[2]提供了CAN CC中同步机制的详细描述。CAN FD和CAN XL使用相同的机制。
CAN XL帧的两阶段结构
与CAN FD相似,CAN XL帧也有两个阶段:
- 仲裁段(Arbitration Phase)—— 该段包含了可能的多个节点同时驱动总线的帧部分。该段中关于总线长度和最大波特率的限制与CAN CC相同。
- 数据段(Data Phase)—— 在数据段中,只有一个发送节点存在。该段中CAN XL协议对总线长度和最大波特率没有任何限制(这对于CAN FD也是如此)。
每个段都有自己独立的位定时配置。两个位定时配置彼此独立,唯一的约束是数据段的波特率必须至少是仲裁段的两倍。
CAN XL位填充规则
动态位填充(Dynamic Bit Stuffing)—— 在仲裁段,从SOF位到数据段开始,使用动态位填充以保持与CAN FD的兼容性。发送节点在连续5个相同位的后面插入一个动态填充位,其值与原值相反。
- 固定位填充(Fixed Bit Stuffing)—— 在数据段,使用固定位填充规则。发送节点在每第10个位之后插入一个固定的填充位,从并包括DL1位开始计算。因此,填充率为S=11。
- 在数据段,CAN XL相较于CAN FD的填充位较少,这样做的目的是为了提高网络吞吐量。表1显示了所有CAN类型因位填充而产生的额外开销。在CC和FD中,最坏情况的填充位与用户位的比例由以下位序列实现。字母i和o表示动态填充位。

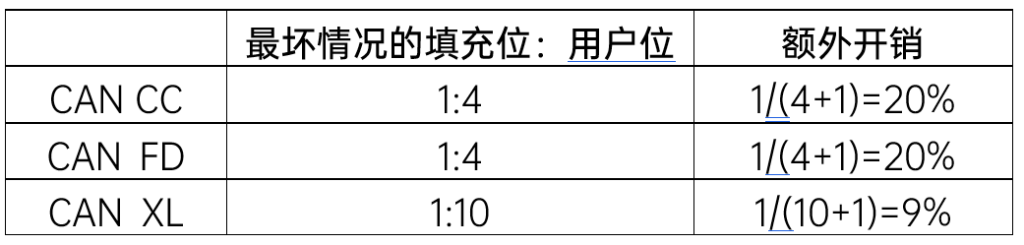
表1:数据段位填充开销
CAN XL中的波特率切换经过精心设计,以应对较高比率的切换,例如从500 kbit/s到20 Mbit/s。与CAN FD相比,CAN XL有两个主要的变化:
- CAN XL在位边沿进行波特率切换(而CAN FD则在采样点进行波特率切换)。
- CAN XL在波特率切换后执行硬同步,这可以消除任何相位误差。
总结来说,在CAN XL中,波特率切换对频率公差df 没有影响。
2.3 频率公差引起的相位误差
节点时钟并不完美。因此,其实际频率fosc会在其标称频率fnom周围有一个相对公差范围df。

位时间是CAN时钟周期的整数倍。对于CAN节点来说,这意味着它们位时间的绝对长度可能会有所不同。意味着CAN节点会以略微不同的波特率运行。
图1说明了引入的相位误差。为了简化图示,假设所有总线和收发器的延迟为零。实际上,延迟不会改变相位误差,但会在图中平移接收方的视图。fTX 是发送节点的时钟频率,而fRX 是接收节点的时钟频率。这两个时钟源的标称频率相同,即fnom 。

图1:接收节点因频率公差df 导致的相位误差
图中展示了fRX > fTX 的情况。这意味着接收节点的位时间比发送节点的位时间短。这种差异导致从接收节点的角度来看,产生了一个正的相位误差。
2.4 推导df 的数学背景
图2展示了用于计算最大时钟频率公差df 的设置。
为了简化描述,我们假设两个节点的标称时钟频率fnom 相等。由于df 是相对公差,因此如果两个节点的标称时钟频率不同,结果依然适用。
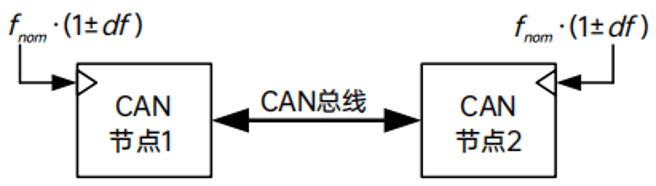
图2:计算可接受节点时钟频率公差的配置
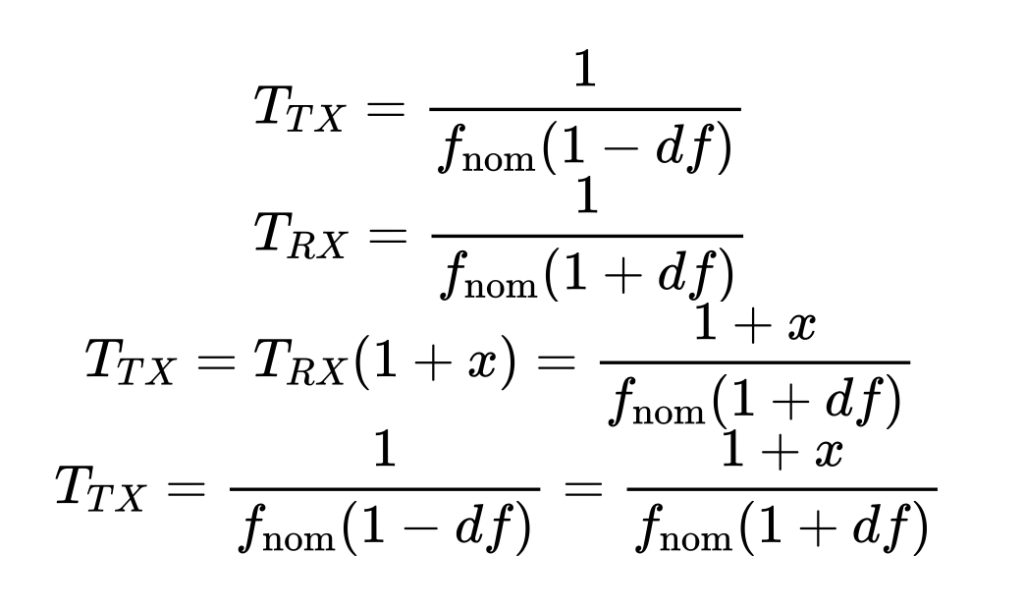
时钟周期T 是频率f 的倒数。
当频率具有公差df 时,周期变化如下:
最坏情况发生在接收节点使用最高频率fRX=fnom·(1+df ),而发送节点使用最低频率fTX =fnom·(1-df )。在这种情况下,接收节点中同步跳跃宽度(SJW)的绝对持续时间SJWnom /(1+df )小于其标称长度。
我们使用以下简单的不等式来推导df 的条件。
这个不等式将得出简单的条件,它们是精确df 的良好近似。接下来我们证明,近似df 与精确df 足够接近。
x是两个节点时钟周期的相对差异:TTX =TRX ·(1+x ),这与前面提到的最坏情况一致,即TRX <TTX 。由于我们关心的是频率公差df,而不是x,因此需要从x计算df 。图3展示了df 与x之间的关系。
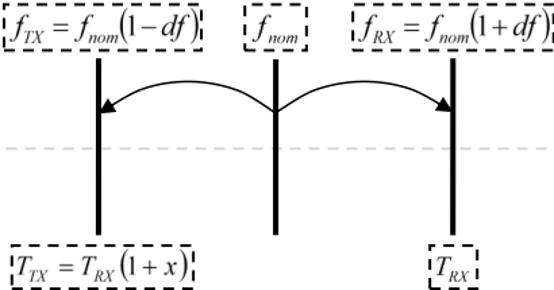
图3:df 与x之间的关系
从图3中我们可以通过以下步骤推导出df :
由此可以得到 dfexact = x /(2+x )。通常x的值较小,在0%到3%之间。这使得我们可以通过dfapprox =x / 2得到df 的高精度近似值。近似引入的绝对误差为dfapprox – dfexact= x2/(4+2x )。这意味着,当x =3%时,绝对误差仅为0.02%。
总结来说,我们推导出了近似条件,这些条件也在ISO标准[12]中列出。
2.5 定义
本小节定义了用于推导条件的变量。
下标
A 仲裁段的变量
D FD数据段的变量
X XL数据段的变量
没有单位的位定时配置元素
BRPD,BRPA
波特率预分频器(Bit Rate Prescaler)
以秒为单位的位定时配置元素
BTA,BTD,BTX
位时间(Bit Time)
TQA,TQD,TQX
时间量子(Time Quantum)
以TQ为单位的位定时配置的元素
sjwA,sjwD,sjwX
同步跳跃宽度(Sync. Jump Width)
ps1A,ps1D,ps1X
相位段1(Phase Segment 1)
ps2A,ps2D,ps2X
相位段2(Phase Segment 2)
btA,btD,btX
位时间(Bit Time)
2.6 条件1:再同步(仲裁段)
该条件确保接收节点在仲裁段能够通过再同步消除完整的相位误差。CAN CC、FD和XL中的仲裁段具有相同的特性。这个条件自几十年前就已被ISO采用。图4展示了最坏情况的位序列。两个下降沿之间的最坏情况距离为10个位时间(btA)。
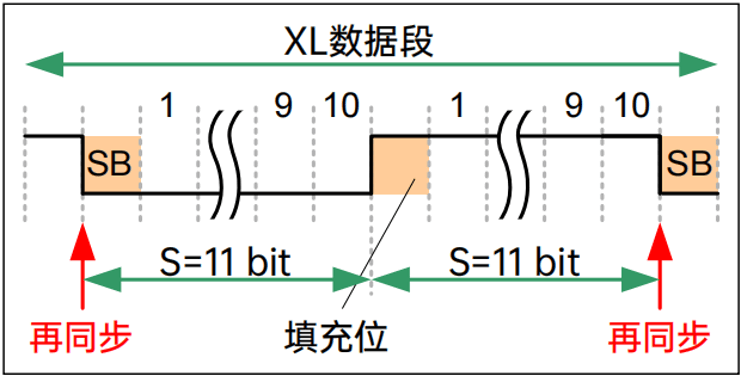
图4:最坏位序列下仲裁段的再同步
接收节点可以通过每次再同步来减少仲裁段的相位误差,每次同步减少的相位误差为sjwA 。为了能够通过每次再同步完全消除相位误差,必须满足以下不等式:
2.7 条件2:采样位接续自身错误标志
该条件确保接收节点正确地采样其错误标志之后的位。通过这种方式,节点能够区分局部错误和全局错误,从而正确地递增接收错误计数器。这个条件在几十年前已经为CAN CC推导出来,并且同样适用于CAN XL,即使CAN XL在数据段总是使用至少是仲裁段两倍的波特率。
图5展示了CAN CC中条件2的最坏情况位序列。
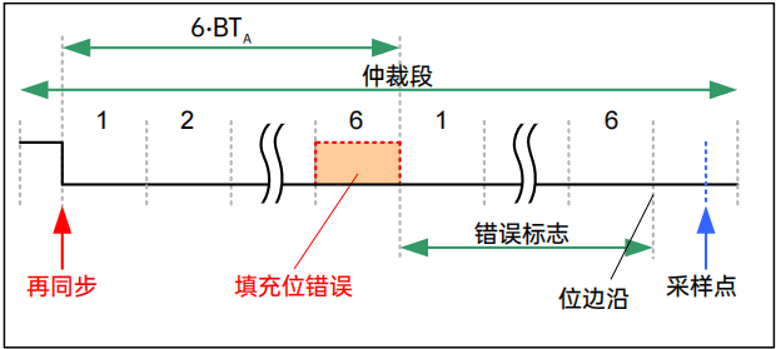
图5:CAN CC中最坏位序列下采样位接续自身错误标志
图6展示了CAN XL中条件2的最坏情况位序列。
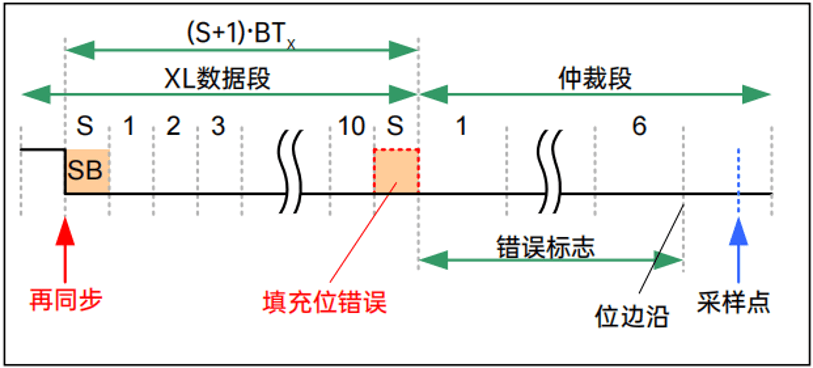
图6:CAN XL中最坏位序列下采样位接续自身错误标志
当CAN XL接收节点在数据段检测到错误时,它会在检测到协议错误的位结束时切换回仲裁段的位定时。然后,节点开始在后续的位中发送其错误标志。由于CAN XL接收节点不使用收发器延迟补偿(TDC),因此这里不需要考虑TDC。
从最后一次再同步到错误标志开始的时间为:
- 在CAN CC中:6 * BTA;
- 在CAN XL中:(S+1) * BTX = 12 * BTX
在CAN XL中,数据段和仲裁段的最小波特率比为2时,从最后一次再同步到错误标志的时间与CAN CC相同。因此,条件2是CAN XL节点最坏情况的近似,因为当波特率比大于2时,CAN XL节点接受的频率公差df 会比条件2要求的更大。
在从最后一次再同步到采样错误标志后的位时,接收节点的相位误差必须小于min(ps1A, ps2A)。这一点涵盖了两种情况:fRX < fTX 和 fRX > fTX.
即条件2为:

2.8 条件3:再同步(XL数据段)
这个条件确保接收节点在XL数据段能够通过再同步消除完整的相位误差。图7展示了一个典型的(但非最坏情况)位流,这种位流可以出现在任何CAN XL帧的XL数据段。由于位填充率S=11,可能出现11个相同值的位序列。在两次再同步之间,存在2*S=22个位。
图7:XL数据段非最坏情况位序列的再同步
图8展示了在XL数据段两个下降沿之间的最坏情况的位序列。这种情况可能出现在XL数据段的末尾,尤其是在具有特定DLC值的帧中。这里,第10个连续的位丢失,这将导致插入一个固定填充位。随后是FCP段,在该段中不应用固定位填充。两个下降沿之间的最坏情况距离为:(2S+1)·btX=23·btX 。这种位序列仅会出现在DLC值是5字节倍数的XL帧中。例如,它可能会出现在DLC=19的XL帧中,这意味着数据段大小为20字节。
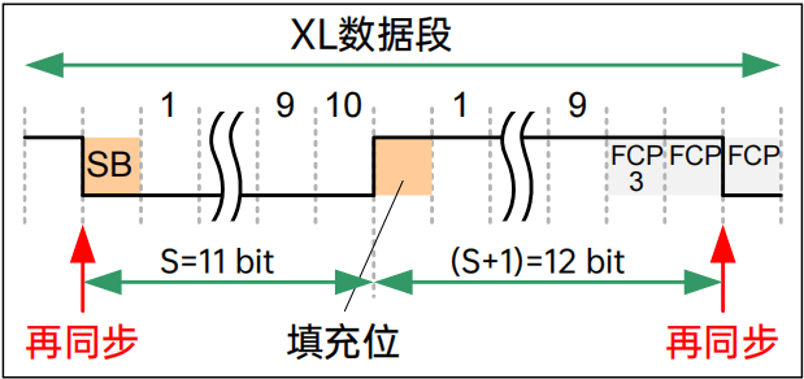
图8:XL数据段最坏情况位序列的再同步
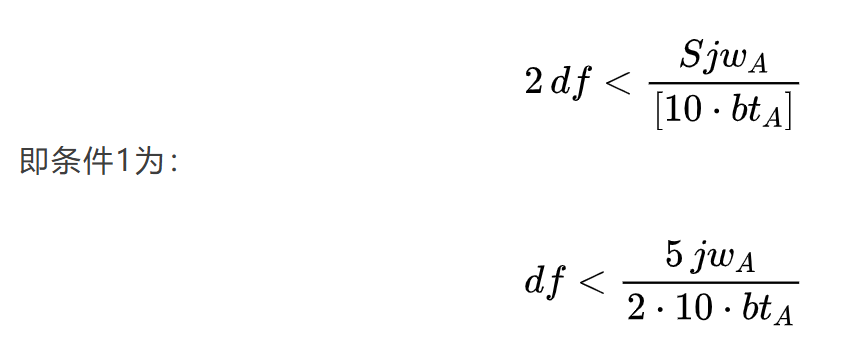
每次再同步时,CAN XL接收节点可以通过sjwX来减少相位误差。为了能够通过每次再同步完全消除相位误差,必须满足以下不等式:
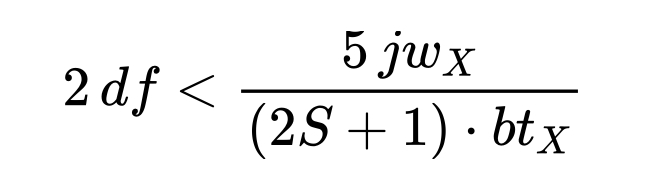
即条件3为:

03 节点时钟频率公差(df )评估
3.1 概述
本节评估了CAN XL中节点时钟频率公差(df )。主要目标是展示df 如何受波特率和所使用的收发器类型影响。此外,我们还将比较CAN FD和CAN XL中的df 。
3.2 CAN XL的位定时配置
df 的计算条件完全依赖于位定时配置。因此,在评估中我们选择了几个位定时配置集。
为了简化评估,我们仅限于数据段,并且对于所有评估,使用相同的仲裁段位定时配置。我们选择仲裁段波特率为0.5Mbit/s,因为这是常见的波特率。表2展示了仲裁段的位定时配置。

表2:CAN XL节点仲裁段位定时(节点时钟频率160MHz)
根据文献[13],数据段中的最佳采样点(SP)位置(位定时的一部分)依赖于物理层(例如收发器和网络拓扑)。所使用的收发器类型对SP位置有显著影响。通常来说,收发器的对称性越高,最佳SP位置越接近位的中心。根据[13],不同类型的收发器引入了不同量的位不对称,具体如下:
HS CAN:较大的不对称
FD 2或5:中等的不对称
SIC:较小的不对
SIC XL:非常小的不对称(以FAST模式操作时)
作为示例,XL数据段的位定时配置我们使用:
- SIC XL收发器优化的位定时配置(来自于CAN XL Plugfest in Baden-Baden, Germany 2024),见表3;
- FD收发器优化的位定时配置,见表4(即SP位置在70%到80%之间)
SIC收发器与SIC XL(在FAST模式下操作)相比,只引入了略微更差的位不对称,导致SP值比SIC XL收发器稍高。因此,本文中没有单独考虑SIC收发器的位定时配置。
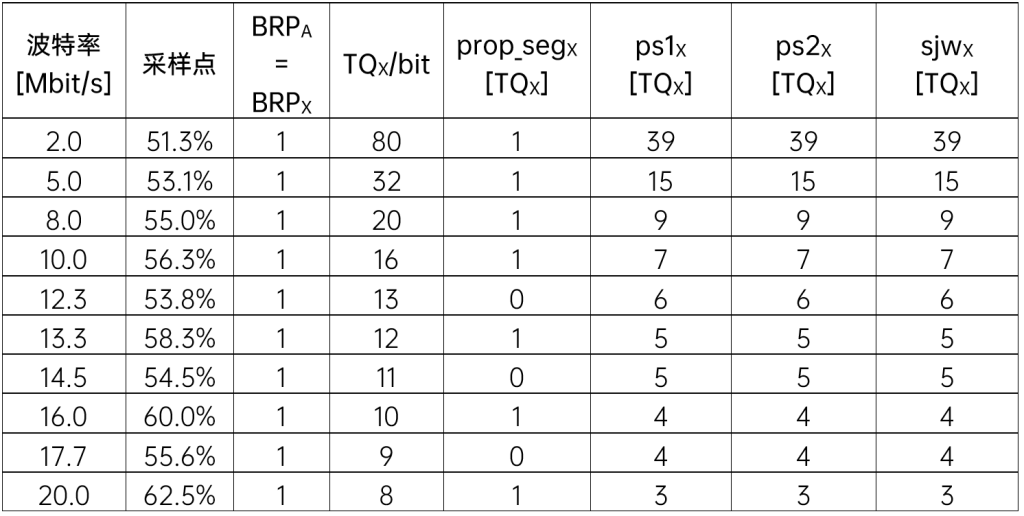
表3:CAN XL节点SIC XL收发器(FAST模式)的XL数据段优化位定时
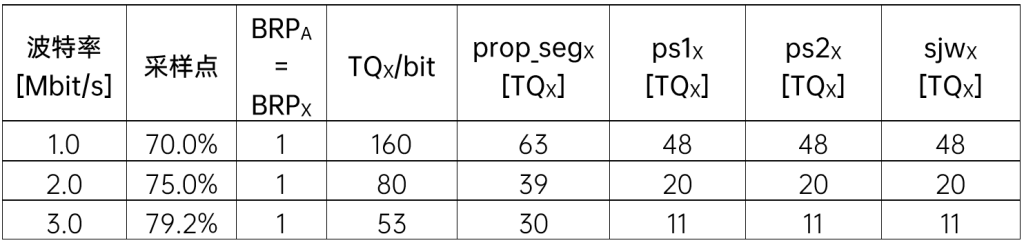
表4:CAN XL节点FD收发器的XL数据段优化位定时
请注意,所给出的位定时配置是示例性的,但被认为是现实的。更改这些配置会导致不同的结果。
3.3 CAN XL中的df 评估
图9展示了针对SIC XL收发器(以FAST模式操作)优化的位定时配置下,节点时钟的频率公差(df )。该图展示了每个条件的结果,并为每个条件绘制了单独的曲线。图中还显示了CAN XL节点所能容忍的df 范围。df 的上限由三个条件中最小的结果决定。
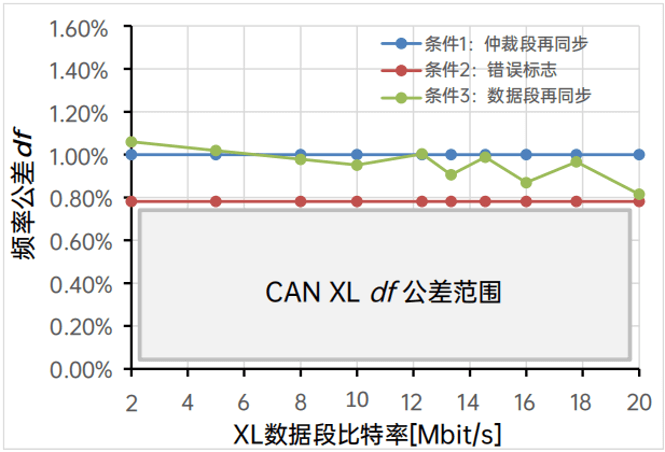
图9:采用SIC XL收发器优化位定时的CAN XL频率公差df
图9的观察结果
三个条件产生了大致相似df 值。
- df 与波特率无关。
- CAN CC中的条件2(错误标志)限制了可用的df 。换句话说,当使用SIC XL收发器(在FAST模式下)时,XL数据段并不会限制df 。即使填充位的数量比原来减少了2倍以上(见表1),df 仍然不受影响。这一变化不是偶然的,而是在CAN XL规范中故意做出的:在会影响到df 的临界点前尽可能减少填充位数量以提高净吞吐量。
- 条件3(数据段的再同步)导致df 在较高波特率下略微下降。这是因为随着波特率的提高,每个位的时间量子(Tq)数减少。这迫使我们将采样点(SP)配置得更靠近位的末尾。
图10展示了针对FD收发器优化的位定时配置下的节点时钟频率公差(df )。这是一个有效的案例,其中CAN XL在大约1到3Mbit/s的低速下使用。图中同样显示了CAN XL节点所能容忍的df 范围。
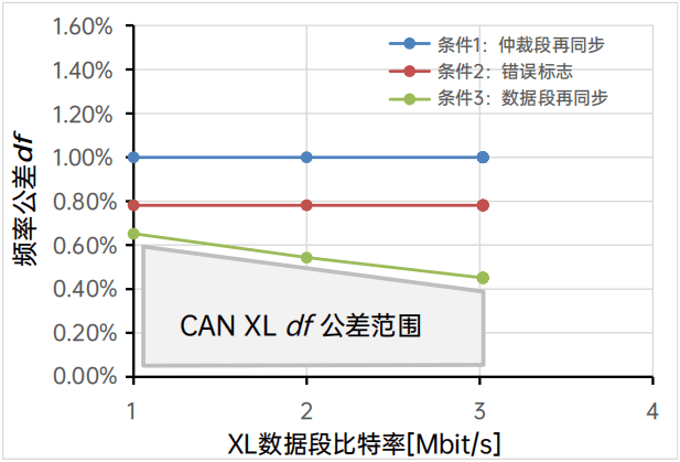
图10:采用FD收发器优化位定时的CAN XL频率公差df
图10的观察结果
- 条件3(数据段的再同步)限制了df 。由于FD收发器引入的位不对称,采样点必须偏移到位的末端。由于不对称性是绝对值,它对高波特率(即较小的位时间)的影响大于低波特率。
- 在3 Mbit/s下可用的绝对df 为0.4%,仍然是当前电子控制单元(ECU)中典型df 的2到3倍。
3.4 CAN FD 的位定时配置
为了将CAN XL中的df 与CAN FD中的df 进行比较,我们还为传统的CAN FD节点定义了一组位定时配置。

表5:CAN FD节点仲裁段位定时(节点时钟为80MHz)
表5展示了仲裁段的位定时配置。它与CAN XL的仲裁段位定时配置具有相同的特性,但使用了不同的参数(这是必要的,因为FD节点使用较低的频率,并且在时间段配置范围上较小)。
作为示例,FD数据段的位定时配置我们使用了一组针对SIC收发器优化的采样点(SP)配置,见表6。这意味着采样点接近位的中心,但不像在FAST模式下操作的SIC XL收发器在CAN XL中那样接近。此外,由于CAN FD节点的时间段配置范围有限,我们在低波特率(1和2 Mbit/s)下使用了BRPD > 1。这不会对df 产生负面影响。(只有当我们选择BRPD > BRPA时,才会产生负面影响。)
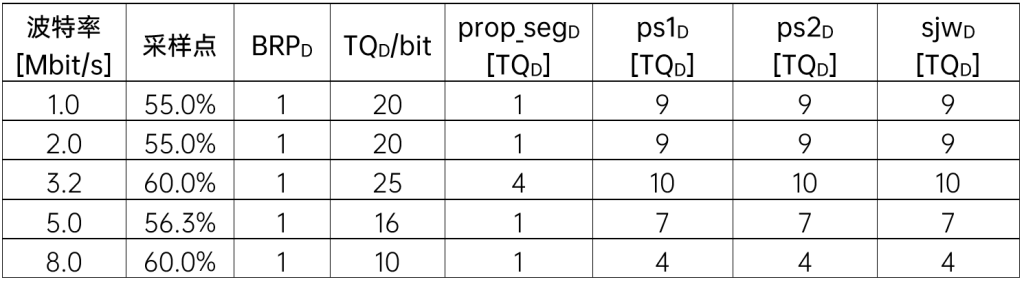
表6:CAN FD节点FD数据段SIC收发器优化位定时(节点时钟为80MHz)
3.5 CAN XL和CAN FD中的df 对比
图11展示了使用针对SIC收发器优化的位定时配置的CAN FD节点的时钟频率公差(df )。每个条件的结果以单独的曲线呈现。图中还显示了CAN FD节点可接受的df 范围。df 的上限由CAN FD的5个条件中的最小值决定。
图11的观察结论
- 条件3(数据段再同步)允许的df 是其他条件的两倍。这是由于CAN FD中的大量填充位,导致在10个位后才会出现一个下降沿。而CAN XL在数据段使用的填充位数不到一半。
- 条件5(波特率切换)导致df 在较高波特率时逐渐减小。在8 Mbit/s时,条件5甚至成为限制因素。(如果与FD收发器一起使用,由于采样点(SP)向位的末尾偏移,条件5将在大多数波特率下成为限制因素。)
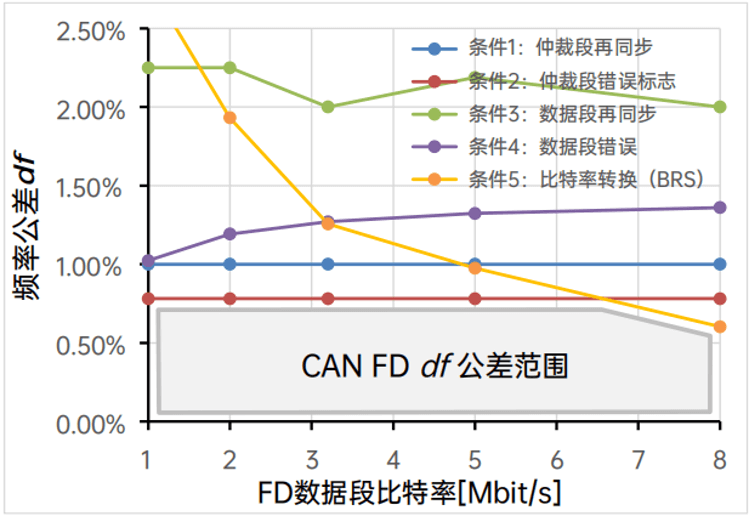
图11:采用SIC收发器优化位定时的CAN FD频率公差df
CAN FD(见图11)与CAN XL(见图9)在SIC和SIC XL收发器上的df 比较结果:
- FD和XL可以使用相同的df 范围,即使在CAN XL中波特率更高。
- 最大df 值为0.78%。
- 在高波特率下,CAN XL的df 略大于CAN FD。
- 在CAN XL中,df 不受数据段/仲裁段波特率的比值影响;而在CAN FD中,df 与之相关。
3.6 df 评估总结
本节的评估表明,对于CAN FD或CAN XL节点,节点时钟频率公差(df )非常相似。
一般来说,我们可以说,使用SIC或SIC XL收发器(它们只引起较低的位不对称)显著改善了df ,因为它将采样点(SP)移向位的中心。在CAN FD和CAN XL中,df 受到来自CAN CC的条件2的限制。因此结论是,在使用SIC和SIC XL收发器时,CC、FD和XL中的df 是相同的。需要注意的是,当使用其他位定时配置时,结果可能会有所不同。
04 相位缓冲(PM)推导
4.1 概述
非累积错误在实际系统中也存在(例如,由收发器引起的位对称性错误,参见第1.4节)。为了评估真实CAN FD总线系统的鲁棒性,文献[5]和[6]提出了一种名为「相位缓冲」的度量。在本节中,我们将该度量方法适应于XL数据段。
4.2 相位缓冲的定义
相位缓冲(PM)是指在给定节点时钟源频率精度(dfsource)的条件下,允许位边沿相对于采样点(SP)发生的偏移。换句话说,它是由物理层效应引起的接收节点能够容忍的位边沿的最大偏移。除了真实的边沿偏移,接收信号可能也会不可靠,例如由于振铃效应。
在帧传输过程中,接收节点和发送节点都会从CAN总线采样位。两个位之间的边沿可能会提前或推迟,这导致了接收节点的两个相位缓冲和发送节点的两个相位缓冲:
- PM1:接收节点的相位缓冲1
- PM2:接收节点的相位缓冲2
- PM1TX:发送节点的相位缓冲1
- PM2TX:发送节点的相位缓冲2
在本文中,PM1TX 和 PM2TX 被省略,因为当发送节点的次级采样点(SSP)按以下公式选择时,PM1 和 PM2 会更严格。文献[13] 通过数学推导证明了这一点。

PM1(位于采样点之前)和PM2(位于采样点之后)有助于系统设计人员评估接收节点选择的数据段采样点(SP)是否适合所使用的物理层。它们将在以下内容中推导。
4.3 最坏情况下的位序列
对于所有四个相位缓冲(PM),在CAN XL数据段的最坏情况位序列是:发送节点发送11个逻辑值为「0」的位,接着是一个固定的填充位,逻辑值为「1」。在此之后的位不再影响结果。11个逻辑值为「0」的位序列发生在一个固定的填充位值为「0」,后跟10个常规值为「0」的位时。
对于高速CAN(High-Speed CAN)、CAN FD和SIC型收发器来说,是由帧内可能的最长显性位序列并紧接一个隐性位组成的。当前的收发器设计会在这个位序列中产生最大的位不对称性。
在SIC XL收发器以FAST模式操作的情况下,是由可能的最长的「0」值位序列,后面跟着一个「1」值的位组成。尽管SIC XL收发器在FAST模式下表现得非常对称,但最坏情况位序列没有反向极性。这是因为CAN节点仅在下降沿上进行同步。
4.4 接收节点的相位缓冲1
图12显示了PM1的最坏情况。
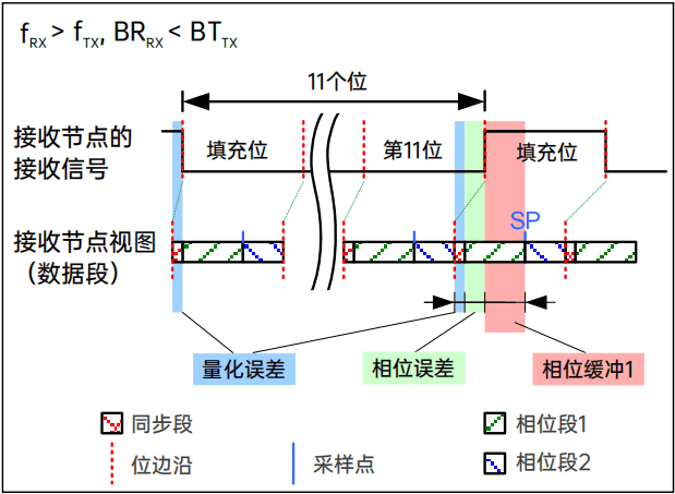
图12:最坏位序列(相位缓冲1)
PM1的最坏情况发生在fRX > fTX(由于df ),且量化误差达到最大时。接收节点的CAN时钟频率较高,导致相位误差。这意味着接收节点的视图发生了偏移,导致填充位的采样点(SP)与到达沿之间的距离减小。接收节点中的量化误差进一步将视图向到达沿方向偏移一个TQ。
为了推导PM1,我们需要计算以下两个时间之间的差值:
- 接收节点从传入的下降沿到第二个填充位的采样点(SP)之间的时间
- 接收信号从下降沿到上升沿的时间(覆盖11个位)
计算PM1的公式为:

4.5 接收节点的相位缓冲2
图13显示了PM2的最坏情况。
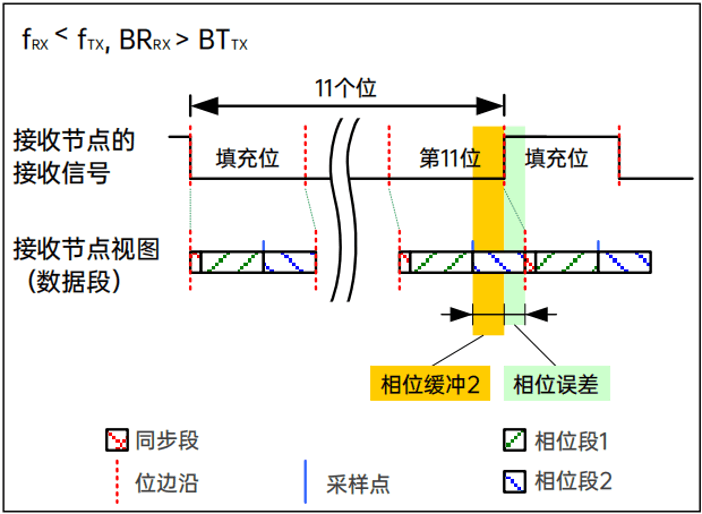
图13:最坏位序列(相位缓冲2)
PM2的最坏情况发生在fRX < fTX(由于df ),且量化误差最小时。接收节点的CAN时钟频率较低,导致相位误差。这意味着接收节点的视图发生了偏移,导致第11位的采样点(SP)与位末尾的到达沿之间的距离减小。
为了推导PM2,我们需要计算以下两个时间的差值:
- 接收信号从下降沿到上升沿的时间(覆盖11个位)
- 接收节点从传入的下降沿到第11位的采样点(SP)之间的时间
计算PM2的公式为:

05 相位缓冲(PM)评估
5.1 概述
本节评估了在第4章中推导的PM1和PM2。
在评估中,我们使用了为SIC XL收发器(以FAST模式操作)优化的XL数据段位定时配置集,见表3。这是最具应用价值的配置,因为它支持最高的波特率。由于SIC收发器的位定时配置与SIC XL类似,因此结果也将相似。
由于我们无法得知实际的dfsource值,因此我们将针对不同的dfsource值计算PM1和PM2,并绘制一系列曲线。
5.2 相位缓冲 1
图14展示了上述示例XL数据段位定时配置(见第5.1节)的PM1。
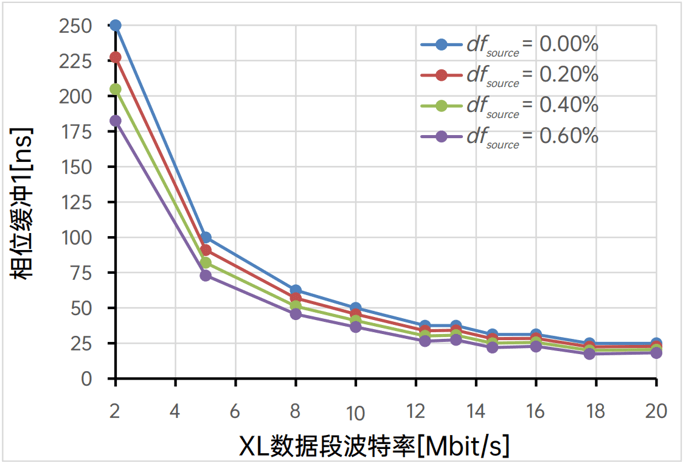
图14:采用SIC XL收发器优化位定时的CAN XL相位缓冲1
观察结果
- PM1随着波特率的提高而减小,且与位时间成正比。例如,在2 Mbit/s时,PM1为225ns,而在20 Mbit/s时,PM1为25ns(大约减少了10倍)。
- PM1高度依赖于SP位置。较晚的SP位置会增加PM1。在图14中,所有SP大致在55%左右,因此这一效应并不显著。
- 频率公差df 对PM1的影响较小。其原因有两个:首先,PM1的最坏情况位序列的长度仅为df 条件3中位序列的一半;其次,实际的dfsource在实现中通常远优于最大允许的df 。
5.3 相位缓冲 2
图15展示了上述示例XL数据段位定时配置(见第5.1节)的PM2。
图15:采用SIC XL收发器优化位定时的CAN XL相位缓冲2
总体上观察结果为PM2的趋势与PM1相似,唯一的不同是SP位置的影响。较晚的SP会减少PM2。
同时在本示例中,PM2的数值与PM1非常接近。其原因在于,SP位置接近位的中心(约55%),因此PM2略小于PM1。
作为示例,在20 Mbit/s且dfsource= 0.2%的情况下,PM2 = 17ns。这意味着上升沿可以比预期提前17ns,而接收节点仍能正确采样第11位。
这17ns的相位缓冲足以补偿SIC XL收发器引入的10ns不对称性,以及其他因素(如引脚或时钟抖动)导致的额外7ns的不对称性。
这表明,即使在较高波特率下,CAN XL仍能维持足够的相位缓冲,以确保可靠的数据传输。
5.4 小结
引入的两个相位缓冲(PM1和PM2)极大地依赖于采样点(SP)的位置。因此,SP的设置应基于对物理层(收发器、网络拓扑等)的仔细评估。我们建议通过物理层仿真和实验室测试来确定最佳SP位置。
相位缓冲的计算公式在[13]中也有提供,并附有Excel计算表,可用于计算和分析不同配置下的相位缓冲。此外,文献[13]还可以帮助系统设计人员识别网络中的不对称性,从而优化位定时配置,提高系统的鲁棒性。
06 结论
节点时钟频率公差(df )和相位缓冲(PM1/PM2)是CAN XL系统设计中必须考虑的两个重要指标。
df 和PM1/PM2基于不同的最坏情况位序列。PM的最坏情况位序列依赖于两个不同的边沿,并针对位不对称性进行分析。df 的计算使用两次下降沿,因此位不对称性对df 没有影响。
本文推导了计算可接受df 的三个条件,并针对多种位定时配置进行了评估。同时,本文推导了PM1和PM2的计算公式,并使用相同的位定时配置进行了评估。
PM和df 都受到SP位置的影响,这突出了SP位置在CAN XL通信稳定性中的重要性。最佳SP位置取决于物理层(如收发器、网络拓扑)。文献[13]提供了关于SP优化的详细指导。
df (节点时钟频率公差)评估总结
- 在使用SIC XL或SIC收发器时,CAN FD和CAN XL支持相同的df 范围,CAN XL甚至支持稍大的df 范围。具体结果可能会因不同的位定时配置而有所变化。
- SIC XL和SIC收发器有助于优化df ,因为它们能将SP位置推向位的中心,从而提高系统的容错性。
PM(相位缓冲)评估总结
- PM主要取决于SP位置,SP位置的调整对PM的影响最大。
- df 对PM的影响较小,相位缓冲的主要决定因素是物理层特性和SP选择。
参考文献
[1] Uwe Kiencke, Siegfried Dais, Martin Litchel, “Automotive Serial Controller Area Network”, SAE Congress, Detroit, Michigan, USA, 1986
[2] Florian Hartwich, Armin Bassemir, “The Configuration of the CAN Bit Timing”, in Proceedings of the 6th international CAN Conference, Turin, Italy, 1999
[3] Florian Hartwich; “CAN with Flexible DataRate”, in Proceedings of the 13th international CAN Conference, Hambach Castle, Germany, 2012
[4] Florian Hartwich, “Bit Time Requirements for CAN FD”, in Proceedings of the 14th international CAN Conference, Paris, France, 2013
[5] Arthur Mutter; “Robustness of a CAN FD Bus System – About Oscillator Tolerance and Edge Deviations”, in Proceedings of the 14th international CAN Conference, Paris, France, 2013
[6] CiA601-3, “CAN FD node and system design, Part 3: System design recom-mendation”, Version 1.0.0, 2018
[7] Arthur Mutter and Florian Hartwich, “Advantages of CAN FD error detection mechanisms compared to classical CAN”, in Proceedings of the international CAN Conference, Vienna, Austria, 2015.
[8] Florian Hartwich, “Introducing CAN XL into CAN Networks”, in Proceedings of the 17th international CAN Conference, Baden Baden, Germany, 2020.
[9] Arthur Mutter, “CAN XL error detection capabilities”, in Proceedings of the 17th international CAN Conference, Baden-Baden, Germany, 2020
[10] Christian Senger, “CRC Error Detection for CAN XL” in Proceedings of the 17th international CAN Conference, Baden Baden, Germany, 2020.
[11] Magnus-Maria. Hell, “The physical layer in the CAN XL world”, in Proceedings of the 17th international CAN Conference, Baden-Baden, Germany, 2020.
[12] ISO 11898-1:2024, Road vehicles — Controller area network (CAN) — Part 1: Data link layer and physical coding sublayer
[13] CiA612-1, “CAN XL guidelines and application notes, Part 1: System design recommendations”, Version 0.0.9, 2023
文章来源
本文基于Dr. Arthur Mutter(博世汽车 首席技术专家)在第18届国际CAN大会(iCC)的演讲。已刊于《第18届iCC会议论文集》2024版,由CiA出版。虹科智能互联团队翻译并分享,旨在与行业同仁共享前沿技术成果。

扫码加入
虹科智能通讯交流群