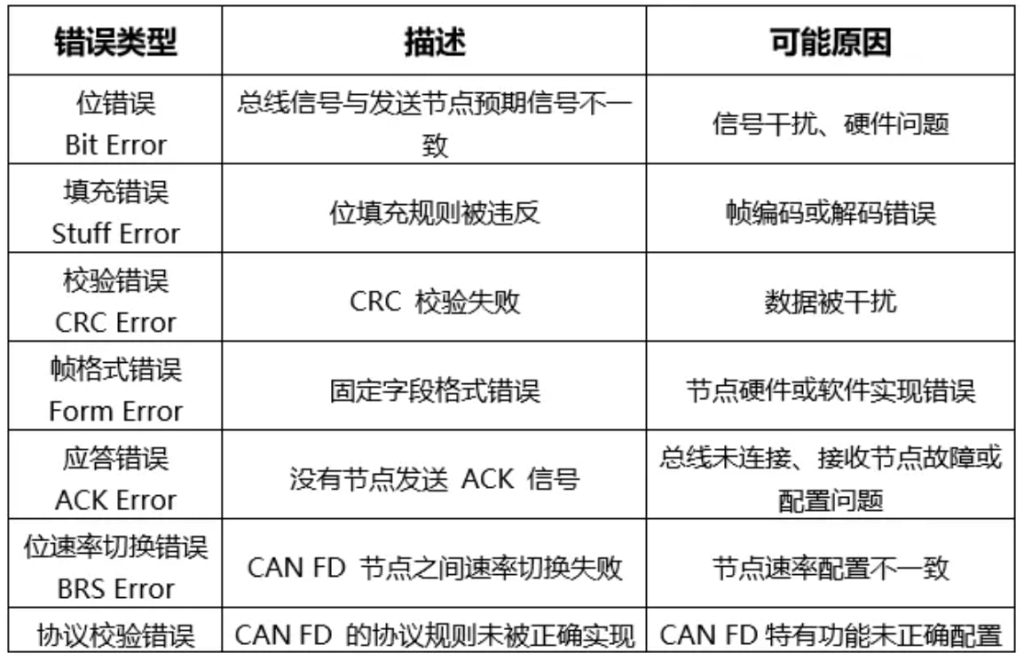
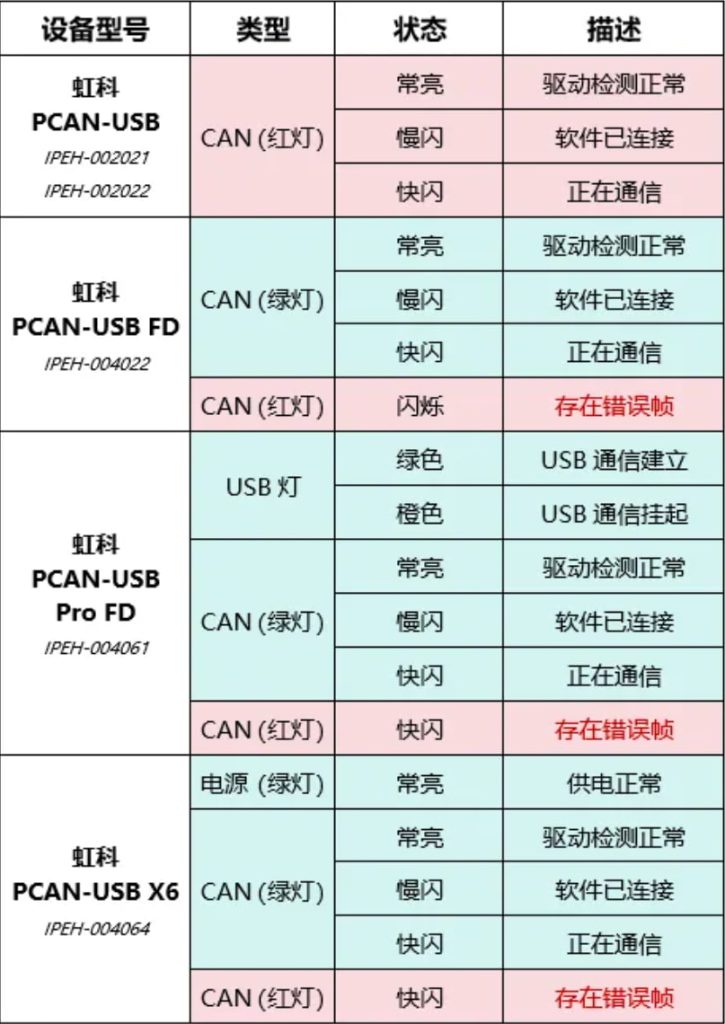
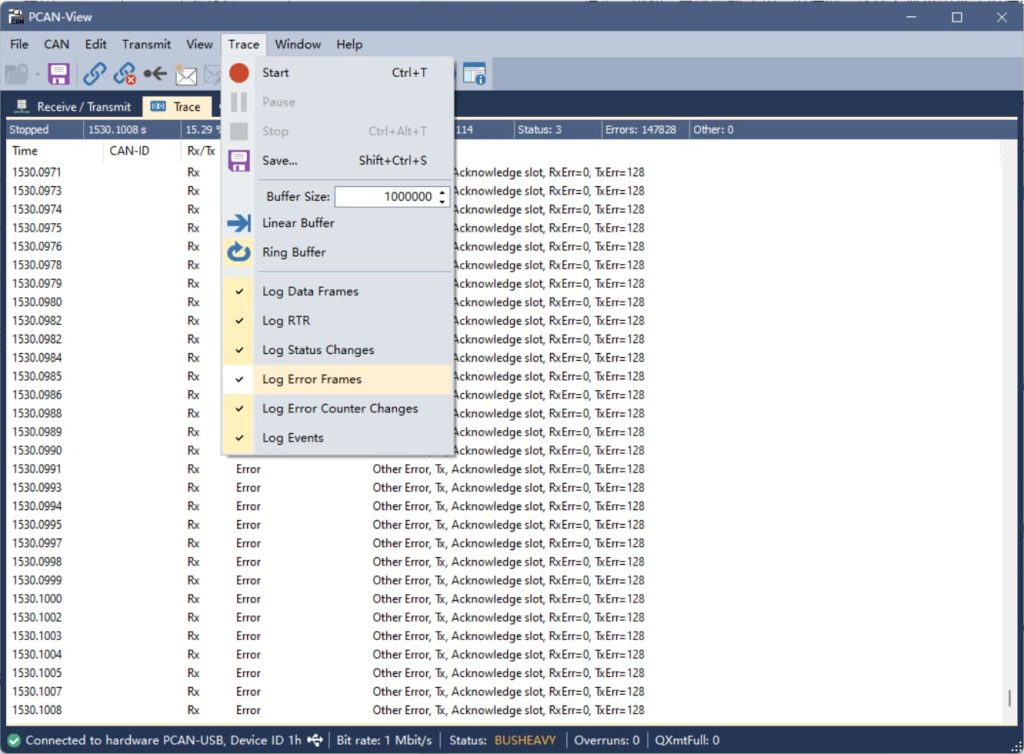
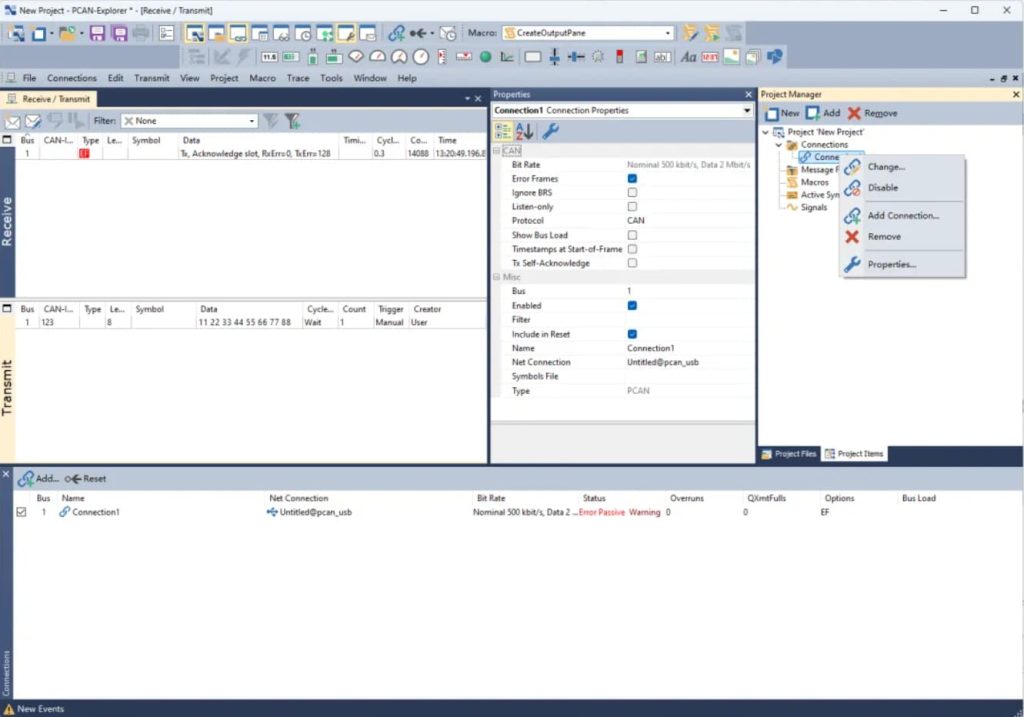
CAN总线故障频发?5分钟掌握PCAN高效排障技巧 Post author:hkcloudclassroom Post published:2025年7月22日 Post category:Uncategorized Post comments:0评论 导读 在现代汽车电子系统以及工业自动化领域,控制器局域网(CAN)总线得到了广泛应用。CAN总线以其高可靠性、高速数据传输等特性,成为连接各个电子控制单元(ECU)的关键纽带。然而,在复杂的电磁环境以及长期运行过程中,CAN总线难免会出现各种错误。虹科PCAN作为一款强大的CAN总线分析工具,在总线错误检测方面发挥着重要作用。本文将详细介绍如何使用虹科PCAN进行总线错误检测。 01 总线错误类型 在深入探讨虹科PCAN的错误检测功能之前,我们先来了解一下CAN总线常见的错误类型。在CAN和CAN FD总线中,错误帧主要用于通知网络通信中发生的错误。以下是几种常见的错误类型及其描述: 1. 位错误(Bit Error) 定义:如果发送节点检测到总线上的电平与自己发送的电平不一致,则会触发位错误。 触发条件:⚠ 数据传输过程中,总线上的信号与发送节点预期的信号不符。 ⚠ 仲裁过程中节点检测到优先级更高的节点存在,不触发位错误。 原因:噪声干扰、硬件故障或电缆问题。 2. 填充错误(Stuff Error) 定义:根据CAN协议规则,在5个连续相同位之后应插入一个相反位(填充位)。若接收节点未检测到这一规则,则会触发填充错误。 触发条件:⚠位流中连续出现超过5个相同位(0或1)。 原因:数据帧编码或解码错误。 3. 校验错误(CRC Error) 定义:接收节点对接收的数据进行循环冗余校验(CRC)计算,与发送端提供的CRC值对比。如果两者不一致,则会触发校验错误。 触发条件:⚠ 接收端的CRC校验值与发送端不匹配。 原因:通信过程中数据被干扰。 4. 帧格式错误(Form Error) 定义:如果帧中某些固定字段未按CAN协议格式定义,则会触发帧格式错误。 触发条件:⚠ 固定字段(如帧结束段)的格式错误, 例如:帧结束段(End of Frame)未检测到正确的7个连续隐性位 ACK(Acknowledge Slot)中的格式错误。 原因:节点硬件或软件错误。 5. 应答错误(ACK Error) 定义:在CAN网络中,发送方在数据帧的ACK槽中未检测到其他节点的应答信号(ACK位)。 触发条件:⚠ 没有任何节点发送ACK位。 原因:(1)总线未连接或其他节点未运行;(2)接收节点配置错误。 6. CAN FD特有错误 在CAN FD总线中,除了上述错误类型,还包括以下特有的错误:A. 位速率切换错误(BRS Error) 定义:CAN FD使用两种速率传输数据:仲裁阶段的低速率和数据阶段的高速率。如果接收端未正确检测速率切换,则会触发此错误。 触发条件:⚠ 接收节点未正确切换到数据阶段的速率。 原因:节点速率配置不一致。 B. 协议校验错误(Protocol Violation Error) 定义:CAN FD引入了严格的协议要求,如果节点检测到违反协议的情况(如帧头、数据长度、校验字段错误),则会触发协议校验错误。 触发条件:⚠ 数据长度码(DLC)与实际数据长度不匹配。错误状态指示器(ESI位)使用不当。 原因:协议实现或配置错误。 02 错误类型汇总 03 PCAN亮灯说明 虹科PCAN硬件具备错误帧检测功能,对于USB接口类型的设备可以通过硬件上的LED灯来判断PCAN当前的状态,具体情况如下表: 04 虹科PCAN上位机软件错误帧分析 在菜单栏的Trace中勾选错误帧(Error Frames)、错误计数器(Error Counter Changes),即可在下方的状态栏(Status)和记录的trace文件中监测到总线上的错误。 右键某一具体的连接(Connection),选择Properties…进入属性页面,勾选错误帧(Error Frames),即可在下方的状态栏(Status)和接收窗口(Receive)中看到对应的错误帧和错误类型分析。 05 案例分析 如图为虹科PCAN-Explorer 6中记录的trace文件,可以通过各参数的情况分析当前总线的状态和通信报文的情况: 综上,当前情况CAN总线上只有一个CAN节点,当该节点寻求通信时,无其它节点响应,即反馈ACK错误。此时只需要将总线上其它节点上线,响应该CAN节点的通讯请求即可将错误恢复。 结语 虹科PCAN作为一款功能强大的CAN(FD)总线分析工具,为工程师提供了全面的总线错误检测功能。通过硬软件的协同工作,能够及时、准确地检测出CAN(FD)总线中出现的各种错误,并提供详细的错误信息,帮助工程师快速定位和解决问题。在汽车电子、工业自动化等领域,合理使用虹科PCAN进行总线错误检测,对于提高系统的可靠性和稳定性具有重要意义。希望本文介绍的内容能够帮助广大工程师更好地利用虹科PCAN设备进行CAN总线的开发和维护工作。 作者简介 陈皓 虹科智能互联技术主管,深耕CAN/LIN总线技术领域,提供专业的二次开发服务。 扫码加入虹科智能通讯交流群 你可能也喜欢 98%工程师不知道的CAN XL系统设计盲区!时钟公差和边沿偏差解析 2025年7月24日 虹科实测 | CAN XL vs CAN FD传输性能深度对比:速率翻倍,抖动锐减! 2025年7月18日 白皮书免费获取: ADAS/AD数据采集与高性能车载计算解决方案 2025年7月23日 发表回复 取消回复您必须 在内发布评论。